- Stage of development
-
Prototype developed and tested under relevant environment (harvesting robots)
- Intellectual property
-
PCT application filed
- Intended collaboration
-
License
- Contact
-
Marc EscamillaVice-presidency for Innovation and Transferm.escamilla@dicv.csic.escomercializacion@csic.es
- Reference
-
CSIC/ME/018
Additional information
#Agriculture, livestock and marine science
#Agrotechnology
#Robotics / Automation
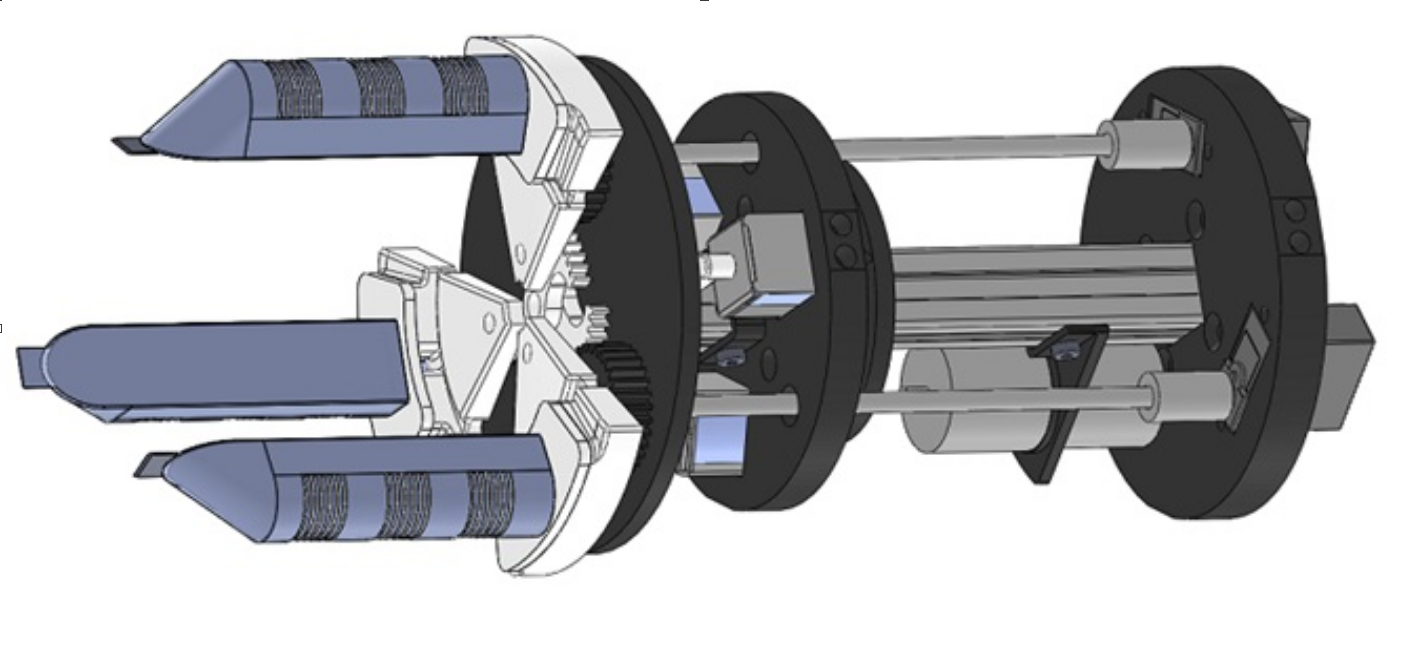
Pneumatic robotic grip with soft actuators for precise delicate gripping
Grip with soft actuators specifically designed for handling delicate objects without damaging them, with independent actuators that allow for an adapted (and real-time adaptable) gripping, being therefore of special interest in automated harvesting tasks.
- Market need
-
The robotization of industrial processes has been a trend in recent years in a large number of sectors, however, there are still some sectors in which said automation presents especially complex challenges. This is the case of the agricultural sector, where the heterogeneity of crops and harvests, the size and irregularity of the land, or the associated costs, among others, make automation difficult, and there is still a wide margin for improvement with respect to current commercial solutions. both in technical and economic terms.
- Proposed solution
-
This grip can be incorporated into any robotic system, both in the agricultural industry (harvest robots, warehouses) and in other industries. Its design allows each gripper to be configured and operated independently, to ensure an adapted and firm grip, suitable for especially fragile objects such as fruits and vegetables. The hydraulic system that makes up the grip facilitates remote operation, even without cables, and without the need for direct electrical power.
- Competitive advantages
-
- Each actuator of the claw can work independently, allowing a totally personalized grip.
- It is a universal system that can be incorporated into any robot on the market.
- Its configuration allows remote or programmable control, without the need for direct power.