- Estado de desarrollo
-
Prototipo desarrollado y probado satisfactoriamente en entorno relevante (robots de cosecha)
- Propiedad industrial
-
PCT solicitada
- Colaboración Propuesta
-
Licencia
- Solicitud de información
-
Marc EscamillaVicepresidencia de Innovación y Transferenciam.escamilla@dicv.csic.escomercializacion@csic.es
- Referencia
-
CSIC/ME/018
Información adicional
#Agricultura, ganadería y ciencias marinas
#Agrotecnología
#Electrónica
#Detección (electrónica)
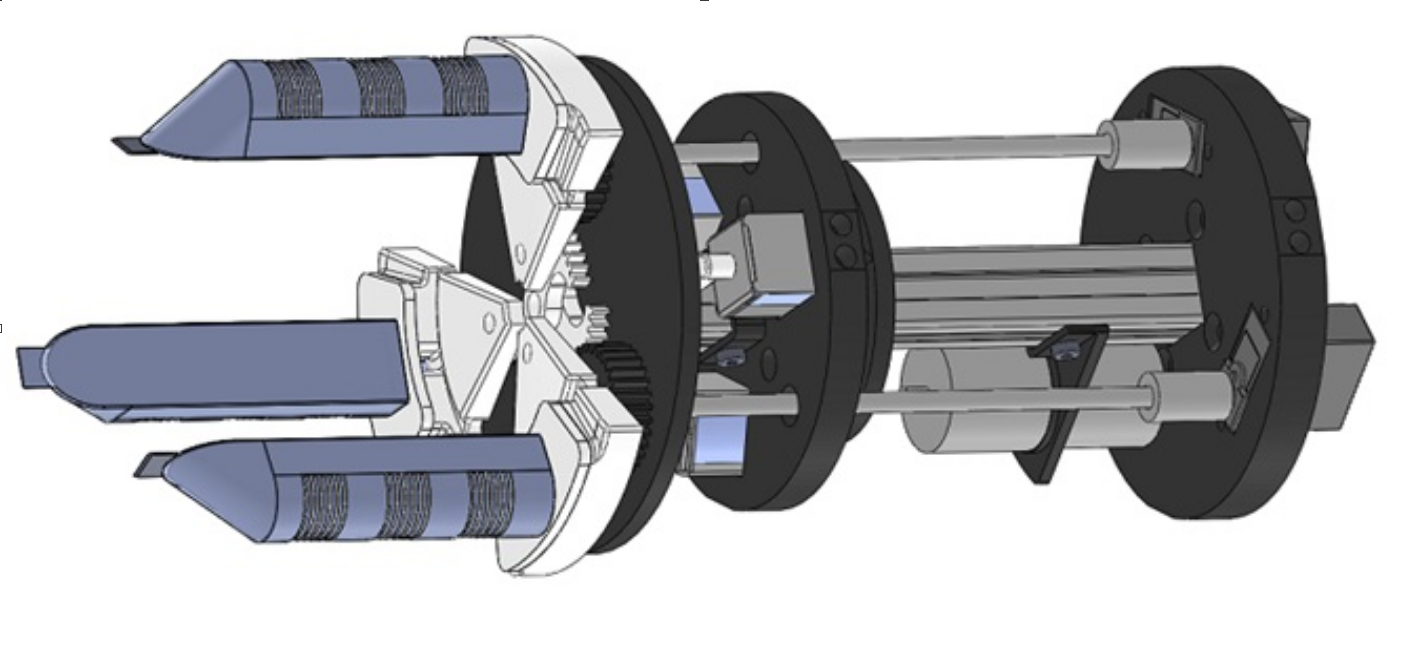
Garra robótica neumática con actuadores blandos para agarre delicado de precisión
Garra con actuadores blandos específicamente diseñada para la manipulación de objetos delicados sin dañarlos, cuyo sistema neumático reduce la necesidad de componentes electrónicos, y permite su control de forma remota sin necesidad de conexión directa a la red eléctrica.
- Necesidad del Mercado
-
La robotización de procesos industriales ha sido una tendencia en los últimos años en un gran número de sectores, sin embargo, existen todavía algunos sectores en los que dicha automatización presenta retos especialmente complejos. Es el caso del sector agrícola, donde la heterogeneidad de los cultivos y las cosechas, el tamaño e irregularidad del terreno, o los costes asociados, entre otros, dificultan la automatización, existiendo todavía un amplio margen de mejora respecto a las soluciones comerciales actuales, tanto en términos técnicos como económicos
- Solución propuesta
-
Esta garra puede incorporarse a cualquier sistema robotizado, tanto de la industria agrícola (robots de cosecha, almacenes) como en otras industrias. Su diseño permite configurar y operar cada actuador (dedo) de forma autónoma, para asegurar un agarre adaptado a la vez que firme, adecuado para objetos especialmente frágiles como la frutas y hortalizas. El sistema hidráulico que compone la garra facilita una operativa remota, incluso sin cables, y sin necesidad de alimentación eléctrica directa.
- Ventajas competitivas
-
- Cada actuador (dedo) de la garra puede funcionar de forma autónoma respecto al resto, permitiendo un agarre totalmente personalizado.
- Es un sistema universal que puede incorporarse a cualquier robot existente en el mercado.
- Su configuración permite un control remoto o programable, sin necesidad de alimentación directa.