- Tipo de expresión:
- Doctorado: Propuesta de dirección de tesis doctoral/temática para solicitar ayuda predoctoral ("Hosting Offer o EoI")
- Ámbito:
- Robotica
- Área:
- Materia
- Modalidad:
- Ayudas para contratos predoctorales para la formación de doctores (antiguas FPI)
- Referencia:
- PIF2024
- Centro o Instituto:
- INSTITUTO DE ROBOTICA E INFORMATICA INDUSTRIAL
- Investigador:
- JULIA BORRAS SOL
- Palabras clave:
-
- Robotic manipulation, Artificial Intelligence, learning
- Documentos anexos:
- 665527.pdf
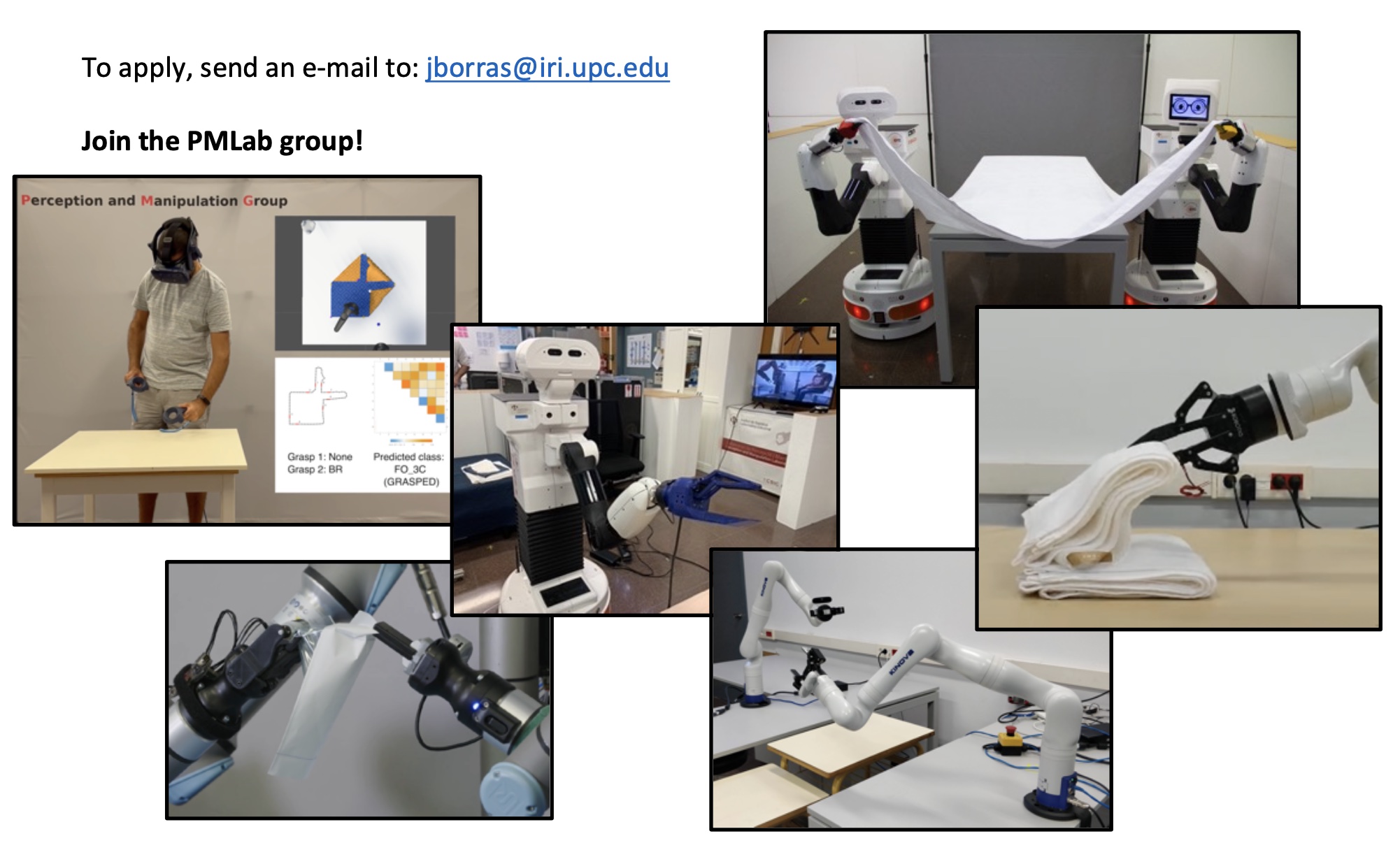
PIF2024 - ROBOTIC DYNAMIC MANIPULATION OF DEFORMABLES (PID2023-152259OB-I00)
Cloth-like objects are very challenging due to their high deformability and difficulty in understanding their configuration under vision or touch. At the PMLab at IRI, we are working toward a model to integrate vision, decision making and action execution in the context of cloth manipulation tasks.
Our new project Chloe-MAP will focus on the understanding of the C-space of cloth to enable its dynamic manipulation. The approach of the thesis will be to define action primitives that rely on robust low-level control to enable dynamics, and high-level planning to combine such actions, for a novel paradigm of Task-And-Motion planning considering dynamics (DTAMP). Exploiting the group’s previous results, we can also explore methods to reason in the C-space, explainability, perception of complex objects, etc.
We are searching for a computer science or engineering student with very good programming skills to implement software solutions and with very good background on engineering and artificial intelligence methods. This FPI pre-doctoral contract includes a training plan that will benefit from another new project, called Romandic, whose objective is to create the first European Center of Excellence for Robotic Manipulation of Deformables. Therefore, the FPI contract will benefit from numerous international collaborations, organized workshops and international seminars in the Romandic project, complementary to what a usual FPI can offer.