- Estado de desarrollo
-
TR =6-7
- Propiedad industrial
-
Solicitud de patente de prioridad en la EPO
- Colaboración Propuesta
-
Licencia y/o codesarrollo
- Solicitud de información
-
Antonio JiménezVicepresidencia de Innovación y Transferenciaa.jimenez.escrig@csic.escomercializacion@csic.es
- Referencia
-
CSIC/AJ/066
Información adicional
#Agricultura, ganadería y ciencias marinas
#Agrotecnología
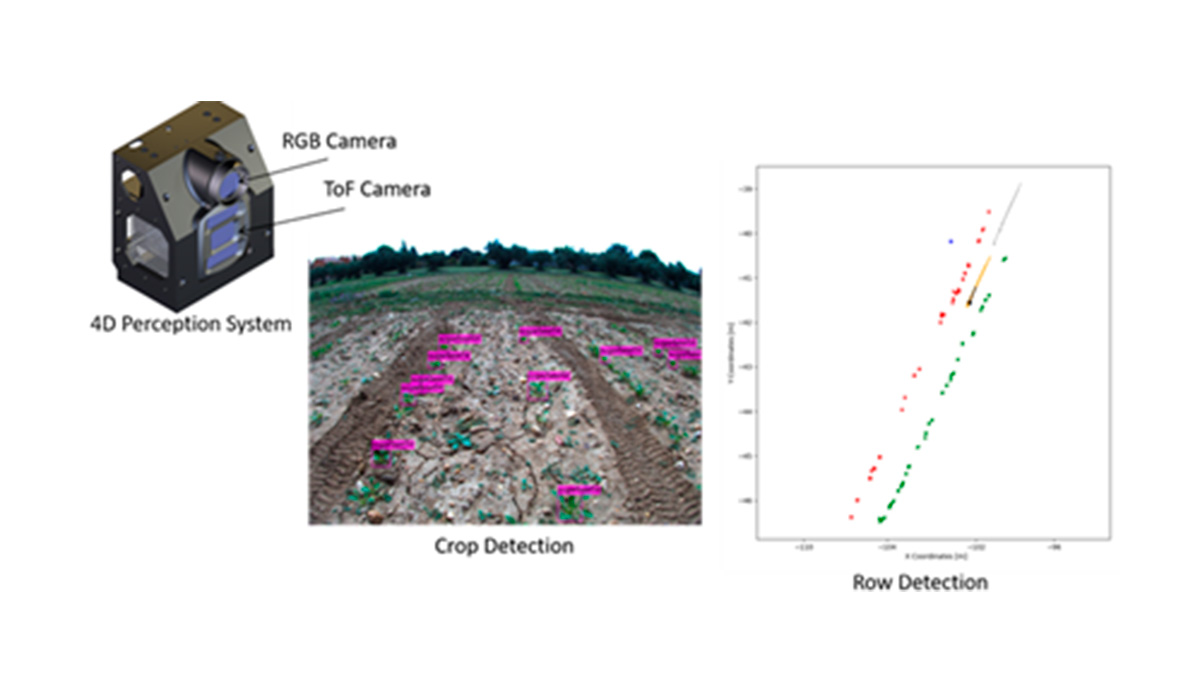
Método y sistema para la guía mejorada de robots en campos de cultivo
Sistema de percepción 4D y procedimiento para guiar a robots autónomos en tareas agrícolas siguiendo las hileras de cultivos.
- Necesidad del Mercado
-
Los robots autónomos en un campo suelen ser guiados mediante Sistemas de Navegación Global por Satélite (GNSS), que se han convertido en tecnologías cruciales para la navegación, el posicionamiento con precisión centimétrica gracias a la tecnología cinemática en tiempo real y las aplicaciones de cronometraje. Además, para utilizar un vehículo autónomo en un cultivo en hileras, el controlador del vehículo necesita conocer la posición de cada hilera con respecto a la posición del robot para evitar pisarlas y, por tanto, destruirlas.
Un sistema alternativo al GNSS sería beneficioso para la navegación en cultivos en hileras, como los sistemas de percepción basados en visión computacional.
- Solución propuesta
-
Un sistema de referencia absoluto (ARF) con el origen adjunto al robot se define con un sistema de referencia ortogonal. Se identifica el plano del suelo respecto al ARF mediante un sistema basado en visión artificial. Se coloca una cámara a color a bordo del robot en una posición conocida con respecto al ARF y de cara al cultivo. Esta cámara toma fotografías del cultivo. A bordo del robot se colocan un dispositivo de imágenes de alcance, una cámara de tiempo de vuelo y un sistema opcional para medir distancias al sujeto. Este dispositivo proporciona al sistema información en tercera dimensión (3D).
- Ventajas competitivas
-
- Uso de robots autónomos móviles en campos de cultivo, sin requerir modificaciones excesivas del trabajo y sin depender de mapas de navegación precisos.
- Solución útil y exitosa incluso en la etapa inicial de crecimiento del cultivo.